





- 0224-07
-
液氯鶴管的一般標準和要求
液氯鶴管的制作通常需要符合一定的技術標準和安全規范,以確保其在運輸和使用過程中的安全性和可靠性。以下是一些液氯鶴管制作的一般標準和要求:材料選擇:液氯鶴管通常使用高強度的特殊合金鋼或不銹鋼,以確保耐腐蝕性和耐壓性能。材料的選擇必須考慮液氯的特性,防止腐蝕和材料疲勞。設計規范:液氯
- 2924-06
-
小鶴管常見的故障現象及原因分析
小鶴管的品種較多,用途十分廣泛,無論裝車或卸車作業都需要安裝一定數量的小鶴管(參考閱讀:鶴管的潛在用途是什么,大鶴管和小鶴管裝車特點是什么?)。裝車小鶴管按動作方式分為回轉式和平移式,按鶴管垂直段伸進罐車的長度分為液下式和高位式,按介質的流變狀態分為單相液體流和液相、氣相兩相流小鶴管。小鶴
- 2824-06
-
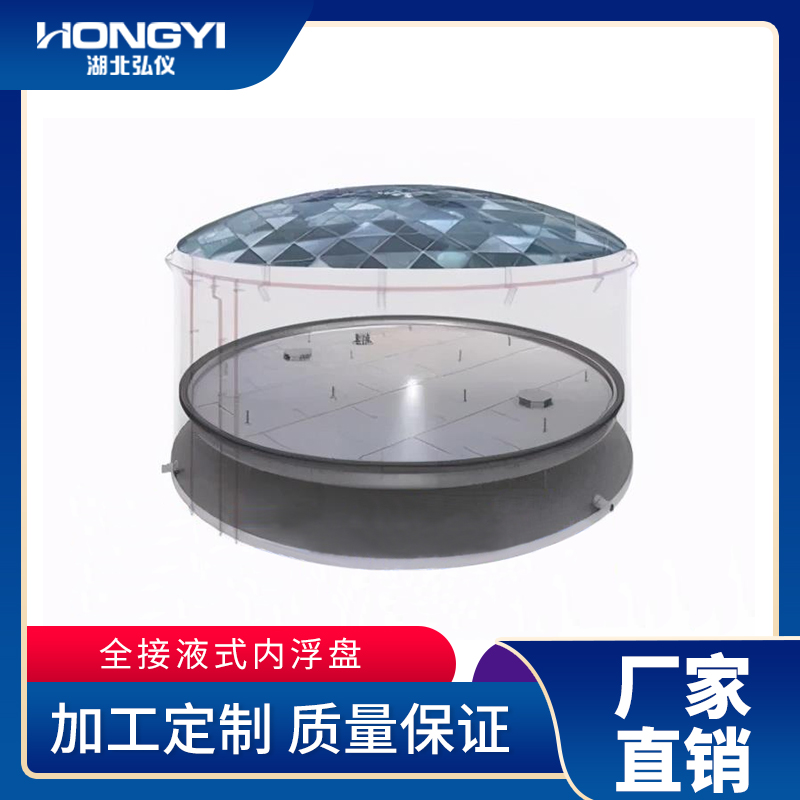
浮筒式非全接液浮盤有什么缺點
國內儲罐廣泛采用浮筒式非全接液浮盤,浮筒式浮盤甲板與浮桶間存在油氣空間。由于油氣容易竄流逸散,形成“氣液轉換”條件,產生大量油氣,大量油氣通過浮盤零部件不密封處泄漏出去,最后散逸到空氣中;非全接液浮筒式浮盤下方有85%左右的揮發面積(浮筒僅能覆蓋15%左右),因此,損耗量極大,同時,油氣空間也存在安全
- 2524-06
-
小鶴管裝車存在的主要問題
小鶴管裝車在實際操作中可能會遇到各種問題,這些問題可能影響操作的安全性、效率和可靠性。當前小鶴管裝車存在的主要問題如下1.解決自動看車問題從開泵到裝車完畢,這段時間裝車工全用來看車。目前,車型復雜,帽孔位置不一,車旁梯子位置不一,棧橋結構形式很難適應上下槽車的需要。棧橋上平梯短了,
- 2124-06
-
鶴管的工作原理是怎么樣的
鶴管(Loading Arm),又稱為裝卸臂,是一種用于液體或氣體從儲罐、船舶、鐵路罐車、汽車罐車等容器進行裝卸作業的設備。其主要功能是將液體或氣體安全、高效地轉移到目標容器中。以下是鶴管的工作原理:工作原理鶴管通過一系列機械臂和管道系統,利用液壓、氣動或電動驅動裝置
- 2024-06
-
液化氣鶴管需要定期檢驗嗎
液化氣鶴管(也稱為液化氣裝卸臂)是用于液化石油氣(LPG)、液化天然氣(LNG)等液化氣體的裝卸設備。由于其操作涉及高壓、低溫及揮發性氣體,定期檢驗和維護是確保安全運行的重要環節。以下是關于液化氣鶴管定期檢驗的基本信息:定期檢驗的必要性安全性:液化氣鶴管在使用過程中需要承受高壓和低溫,
- 1824-06
-
全自動鶴管帶來的經濟利益
全自動鶴管是一種用于液體裝卸的機械設備,廣泛應用于石油、化工、食品等行業。其自動化特性帶來了多方面的經濟利益,包括但不限于以下幾點(一)能夠實現一鍵智能裝車,極大減少了對人工操作的依賴,提高了裝車作業的效率。同時,系統還能夠實現鶴管三維運行自動化、鶴管與槽車罐口
- 1324-06
-
瀝青和焦油鶴管有哪些什么特點
對于瀝青和焦油這樣的高黏度液體,通常需要專門設計的裝卸鶴管來滿足其特殊需求。以下是針對瀝青和焦油的裝卸鶴管的一些特點:高溫耐受性:瀝青和焦油在裝卸過程中通常需要在高溫下進行,因此裝卸鶴管需要具備良好的高溫耐受性,以確保安全操作和持久使用。高粘度處理:由于瀝青和焦油的高黏度,裝卸鶴
- 1124-06
-
全自動鶴管如何實現自動化
(一)鶴管自動定位全自動對位智能流體裝卸臂系統具備罐口自動對位功能。當槽車司機將槽車停靠在適當位置并打開罐蓋后,中控室可以遠程確認并發出對位指令。系統通過自動尋找罐口,引導鶴管準確移動到罐口上方,并自動放下垂管部分。對位過程迅速準確,對位時間≤15秒,大大提高了裝車作業的效率。在裝
- 0424-06
-
下部裝油為什么選擇下裝鶴管
上部裝油是油品從罐車頂部灌油口裝入,因其具有技術成熟,設備造價低等特點,我國成品油的公路發油較普遍地采用上部裝油的方式。與上部裝油方式不同,下部裝油是通過裝油鶴管與汽車油罐車的艙底部進油口相連接。通過泵送將油品裝入汽車油罐艙內。下部裝油工藝的特點是它設有一個與輸油總管相接的集成輸送裝
- 鶴管
- 油氣回收系統
- 裝車控制系統
- 無人值守系統
- 橇裝
- 廢氣處理


